



焊缝轨迹跟踪技术:结合激光传感器和视觉传感器离线工作方式的优点,采用激光传感器实现焊接过程中的焊缝跟踪。
提升焊接机器人对复杂工件进行焊接的柔性和适应性,结合视觉传感器离线观察获得焊缝跟踪的残余偏差,基于偏差统计获得补偿数据并进行机器人运动轨迹的修正,在各种工况下都能获得佳的焊接质量。
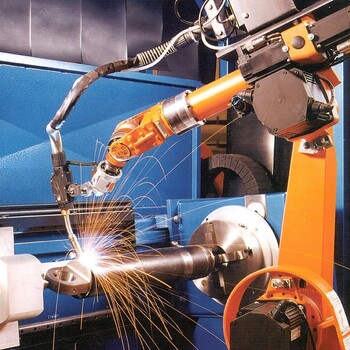
一般的弧焊机器人是由示教盒、控制盘、机器人本体及自动送丝装置、焊接电源等部分组成。可以在计算机的控制下实现连续轨迹控制和点位控制。
弧焊机器人是指用于进行自动弧焊的工业机器人。弧焊机器人的组成和原理与点焊机器人基本相同,在20世纪80年代中期,哈尔滨工业大学的蔡鹤皋、吴林等教授研制出了中国台弧焊机器人——华宇-Ⅰ型弧焊机器人。弧焊机器人主要应用于各类汽车零部件的焊接生产。在该领域,国际大弧焊机器人型工业机器人生产企业主要以向成套装备供应商提供单元产品为主。
稳定和提高焊接质量,其均一性。采用机器人焊接时,对于每条焊缝的焊接参数都是恒定的,焊缝质量受人的因素影响较小,降低了对工人操作技术的要求,因此焊接质量是稳定的。而人工焊接时,焊接速度、干伸长等都是变化的,因此很难做到质量的均一性。改善了工人的劳动条件。采用机器人焊接工人只是用来装卸工件,远离了焊接弧光、烟雾私飞溅等。
联系我时,请说是在黄页88网郑州智能机器人栏目上看到的,谢谢!